
By: Abouzied M. A. Nasar, Benedict D. Rogers, Georgios Fourtakas, Scott T. Kay, Matthieu Schaller
This paper highlights the first steps towards enabling graphics processing unit (GPU) acceleration of the smoothed particle hydrodynamics (SPH) solver for cosmology SWIFT and creating a hydrodynamics solver capable of fully leveraging the hardware available on heterogeneous exascale machines composed of central and graphics processing units (CPUs and GPUs). Exploiting the existing task-based parallelism in SWIFT, novel combinations of algorit... more
This paper highlights the first steps towards enabling graphics processing unit (GPU) acceleration of the smoothed particle hydrodynamics (SPH) solver for cosmology SWIFT and creating a hydrodynamics solver capable of fully leveraging the hardware available on heterogeneous exascale machines composed of central and graphics processing units (CPUs and GPUs). Exploiting the existing task-based parallelism in SWIFT, novel combinations of algorithms are presented which enable SWIFT to function as a truly heterogeneous software leveraging CPUs for memory-bound computations concurrently with GPUs for compute-bound computations in a manner which minimises the effects of CPU-GPU communication latency. These algorithms are validated in extensive testing which shows that the GPU acceleration methodology is capable of delivering up to 3.5x speedups for SWIFTs SPH hydrodynamics computation kernels when including the time required to prepare the computations on the CPU and unpack the results on the CPU. Speedups of 7.5x are demonstrated when not including the CPU data preparation and unpacking times. Whilst these measured speedups are substantial, it is shown that the overall performance of the hydrodynamic solver for a full simulation when accelerated on the GPU of state-of-the-art superchips, is only marginally faster than the code performance when using the Grace Hopper superchips fully parallelised CPU capabilities. This is shown to be mostly due to excessive fine-graining of the tasks prior to offloading on the GPU. Fine-graining introduces significant over-heads associated with task management on the CPU hosting the simulation and also introduces un-necessary duplication of CPU-GPU communications of the same data. less
Collaborative Precoding Design for Adjacent Integrated Sensing and Communication Base Stations
0upvotes
By: Wangjun Jiang, Zhiqing Wei, Fan Liu, Zhiyong Feng, Ping Zhang
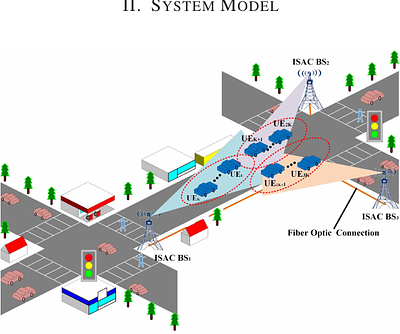
Integrated sensing and communication (ISAC) base stations can provide communication and wide range sensing information for vehicles via downlink (DL) transmission, thus enhancing vehicle driving safety. One major challenge for realizing high performance communication and sensing is how to deal with the DL mutual interference among adjacent ISAC base stations, which includes not only communication related interference, but also radar sensing... more
Integrated sensing and communication (ISAC) base stations can provide communication and wide range sensing information for vehicles via downlink (DL) transmission, thus enhancing vehicle driving safety. One major challenge for realizing high performance communication and sensing is how to deal with the DL mutual interference among adjacent ISAC base stations, which includes not only communication related interference, but also radar sensing related interference. In this paper, we establish a DL mutual interference model of adjacent ISAC base stations, and analyze the relationship for mutual interference channels between communications and radar sensing. To improve the sensing and communication performance, we propose a collaborative precoding design for coordinated adjacent base stations to mitigate the mutual interference under the transmit power constraint and constant modulus constraint, which is formulated as a non-convex optimization problem. We first relax the problem into a convex programming by omitting the rank constraint, and propose a joint optimization algorithm to solve the problem. We furthermore propose a sequential optimization algorithm, which divides the collaborative precoding design problem into four subproblems and finds the optimum via a gradient descent algorithm. Finally, we evaluate the collaborative precoding design algorithms by considering sensing and communication performance via numerical results. less