Optimal coupling and task-specificity when learning rhythmic synchronization with a tool with varying levels of predictability and controllability
Optimal coupling and task-specificity when learning rhythmic synchronization with a tool with varying levels of predictability and controllability
Dotov, D.; de Poel, H.; Lamoth, C.
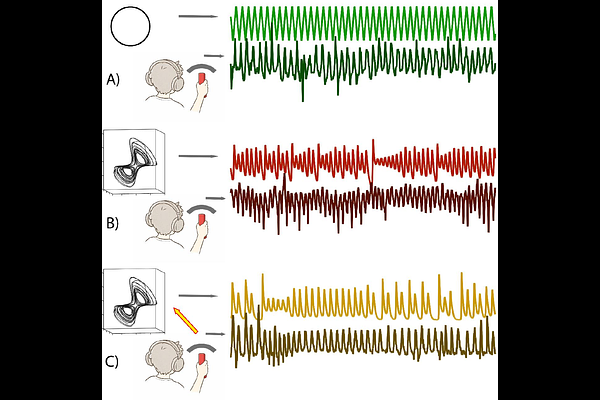
AbstractSensorimotor learning and tool use involve synchronizing with external dynamics. Many everyday tools possess nonlinear hidden dynamics. Here we investigate how learning to synchronize with the complex dynamics of a tool depends on the degree of predictability and reciprocal coupling between user and tool. We introduce the concept of optimal coupling to measure adaptive user-tool coordination. Groups of participants practiced tracking an auditory stimulus in three conditions: 1) the tool was non-interactive and produced a periodic stimulus, 2) non-interactive and unstable stimulus, and 3) unstable but interactive stimulus which was coupled weakly to the participants movements and thus afforded control. Learning, retention, and transfer to visual modality were assessed using unpracticed test stimuli. Directional effective coupling was quantified using transfer entropy. Results showed that learning tended to be task-specific and there was no transfer to the visual modality. Interactive unstable practice exhibited some retention and generalization. We found a convergent reorganization of coupling during practice with the interactive unstable tool: stimulus-to-human coupling started high and decreased while human-to-stimulus coupling started low and increased. This suggests that embodiment of personalized rehabilitation technologies brings optimal reciprocal coupling in which sensorimotor-tool control is consistent with the minimal intervention principle postulated for within-body control.